Teorema del Sandwich
Proposición:
Sea ![]() : U ⊂ ℜⁿ ⟶ ℜᵐ,
: U ⊂ ℜⁿ ⟶ ℜᵐ, ![]() ,
,
y sea ![]() ,
,
![]() = (l₁, l₂, …, lₘ) ∈ ℜᵐ
= (l₁, l₂, …, lₘ) ∈ ℜᵐ
Entonces
![]()
Teorema (del Sandwich):
Supongamos que tenemos f, g, h:U ⊂ ℜⁿ ⟶ ℜ, y sea ā un punto de acumulación de U. Si existe un entorno E de ā tal que ![]() ∈ (E - {ā}) ∩ U y se verifica que:
∈ (E - {ā}) ∩ U y se verifica que:
![]()
Entonces:
![]()
Ejemplo nº 4
Observación:
Otro método de acercarnos al origen consiste en usar coordenadas polares, haciendo que r tienda a cero. Muchas veces este sistema es muy cómodo.
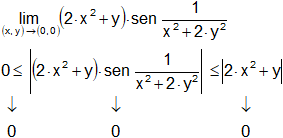
Ejemplo nº 5
1) ![]()
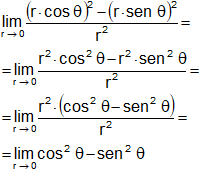
Luego el límite dependen del ángulo. Por tanto, no existe el límite.
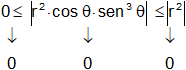
2) ![]()
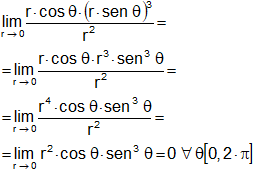
Por el teorema del Sandwich
Continuidad
Definición:
Decimos que ![]() : U ⊂ ℜⁿ ⟶ ℜᵐ es contínua en ā, punto de acumulación de U, si:
: U ⊂ ℜⁿ ⟶ ℜᵐ es contínua en ā, punto de acumulación de U, si:
Existe ![]()
Existe y es finito ![]()
![]()
Propiedades:
1) Si ![]() ,
, ![]() :ℜⁿ ⟶ ℜᵐ son continuas en ā, entonces
:ℜⁿ ⟶ ℜᵐ son continuas en ā, entonces ![]() ±
± ![]() es contínua en ā
es contínua en ā
2) Si f, ![]() :ℜⁿ ⟶ ℜ son continuas en ā, entonces f·g es contínua en ā
:ℜⁿ ⟶ ℜ son continuas en ā, entonces f·g es contínua en ā
3) Si además g(ā) ≠ 0, entonces f/g es contínua en ā
• Proposición:
![]() = (f₁, …, fₘ): ℜⁿ ⟶ ℜᵐ es contínua en ā si y solo si f₁:Rⁿ ⟶ ℜ son continuas en ā para i = 1, …, m.
= (f₁, …, fₘ): ℜⁿ ⟶ ℜᵐ es contínua en ā si y solo si f₁:Rⁿ ⟶ ℜ son continuas en ā para i = 1, …, m.
Autor: José Luis Martínez-Avila. España.
Editor: Ricardo Santiago Netto (Administrador de Fisicanet).
- ‹ Anterior
- |
- Siguiente ›