Aplicaciones de los determinantes (primera parte)
En el tema de matrices y su aplicación a los sistemas de ecuaciones lineales, se vio cómo resolverlas mediante el teorema de Gauss. Con los determinantes, y aplicando la regla de Cramer, veremos otra manera de calcular los sistemas de ecuaciones lineales.
Regla de Cramer
Los pasos a seguir para calcular los sistemas de ecuaciones según la regla de Cramer son los siguientes:
1) Hallar la matriz ampliada (A ⋮ b) asociada al sistema de ecuaciones, esto es: que la primera columna esté formada por las entradas de los coeficientes de la primera incógnita de las ecuaciones; que la segunda columna la formen las de la segunda incógnita, y así hasta llegar a la última columna, que estará constituida por las entradas de los términos independientes de las ecuaciones.
2) Calcular el determinante de A.
3) Aplicar la regla de Cramer, que consiste en:
a) Ir sustituyendo la primera columna del det (A) por los términos independientes;
b) Dividir el resultado de este determinante entre el det (A) para hallar el valor de la primera incógnita;
c) Continuar sustituyendo los términos independientes en las distintas columnas para hallar el resto de las incógnitas
Ejemplo:
Sea el sistema de ecuaciones lineales formado por dos ecuaciones con dos incógnitas:
![]()
Encontrar el valor de x e y mediante la regla de Cramer. Empezaremos con el primer paso, que consiste en hallar la matriz ampliada A ⋮ b asociada al sistema de ecuaciones lineales:
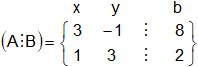
El segundo paso es calcular el determinante de A. Así pues:
det A = ![]() = 15 + 2 = 17
= 15 + 2 = 17
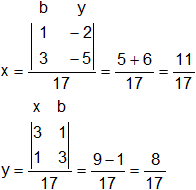
Y el tercero y último paso consiste en calcular las incógnitas:
Discusión de los sistemas de ecuaciones lineales
A continuación, se estudiará la manera de saber de antemano si un sistema de ecuaciones lineales tienen o no solución y si tienen una única o infinitas soluciones. El estudio o discusión de los sistemas de ecuaciones se efectúa aplicando el teorema de Rouché-Fröbenius. Este dice que con un sistema de ecuaciones lineales pueden ocurrir dos cosas:
1) Que el sistema de ecuaciones sea un sistema compatible (S.C.), esto es, que tenga solución.
2) Que el sistema de ecuaciones sea un sistema incompatible (S.I.) o que no tenga solución.
El primer caso puede dividirse en dos:
a) Que sea un sistema compatible y determinado (S.C.D.), esto es, que tenga una única solución;
b) Que el sistema sea compatible e indeterminado (S.C.I.), es decir, que tenga infinitas soluciones.
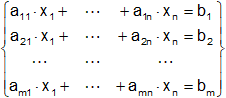
Sea un sistema no homogéneo:
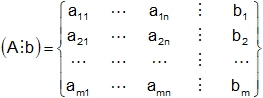
En consecuencia, la matriz ampliada Ab asociada al sistema de ecuaciones es:
y el sistema será compatible cuando:
rango (A) = rango (A ⋮ b), lo que suele expresarse diciendo que el rango de la matriz de coeficientes coincide con el rango de la matriz ampliada.
Si el sistema anterior es compatible y rango (A) = rango (A ⋮ b) = número de incógnitas, el sistema es compatible y determinado, es decir, tiene una única solución. Si, por el contrario, tenemos que rango (A) = rango (A ⋮ b) < número de incógnitas, el sistema es compatible e indeterminado, es decir, tiene infinitas soluciones.
Si rango (A) ≠ rango (A ⋮ b), el sistema es incompatible y no tiene ninguna solución.
Ejemplos:
Discutir, sin resolver, los siguientes sistemas de ecuaciones:
a)
![]()
b)
![]()
c)
![]()
a)
![]()
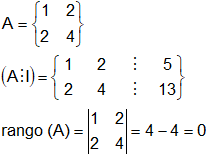
Rango (A) = 1
rango (A ⋮ B) = ![]() = 13 - 10 = 3 ≠ 0
= 13 - 10 = 3 ≠ 0
Rango (A ⋮ B) = 2
Puesto que rango (A) = 1 ≠ rango (A ⋮ B) = 2, el sistema es incompatible; no existe ninguna solución.
b)
![]()
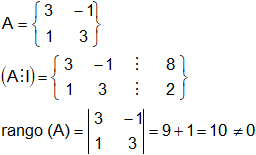
Rango (A) = 2
rango (A ⋮ b) = ![]() = 6 - 8 = -2 ≠ 0
= 6 - 8 = -2 ≠ 0
Rango (A ⋮ b) = 2
Ya que rango (A) = rango (A ⋮ b) = 2 = número de incógnitas, el sistema es compatible y determinado; es decir, existe una única solución.
c)
![]()
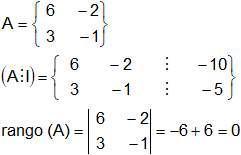
Rango (A) = 1
rango (A ⋮ b) = ![]() = -30 + 30 = 0
= -30 + 30 = 0
De momento, rango (A ⋮ b) = 1
rango (A ⋮ b) = ![]() = 10 - 10 = 0
= 10 - 10 = 0
Rango (A ⋮ b) = 1
Puesto que rango (A) = rango (A ⋮ b) = 1 < número de incógnitas, el sistema es compatible e indeterminado; existen infinitas soluciones.
Autor: Jesús. España.
Editor: Ricardo Santiago Netto (Administrador de Fisicanet).